
阿巴阿巴阿巴 我們繼續來講理論
現在我們來講基模理論
他認為 學到的經驗 是概念 是規則 是關係
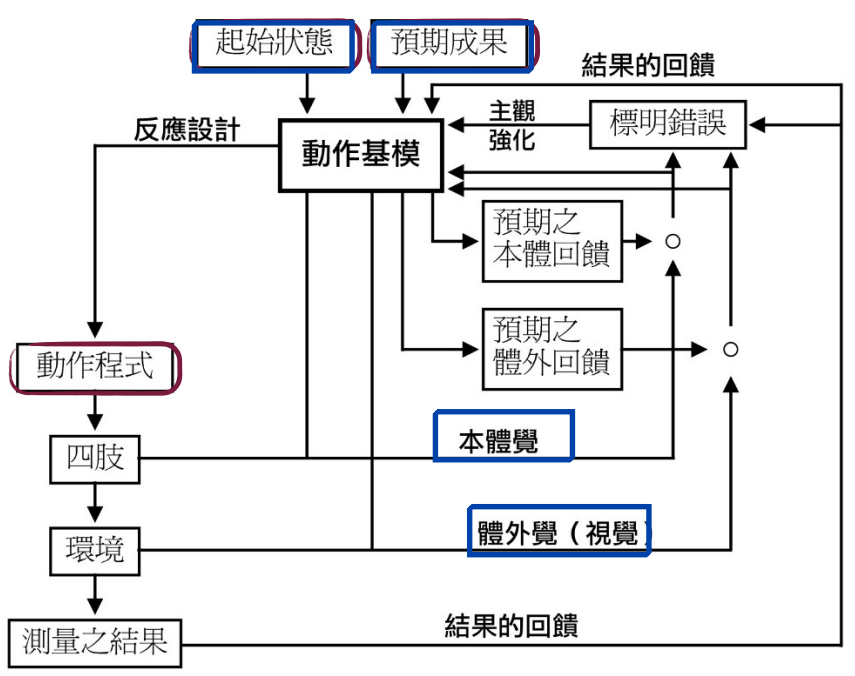
而學習是具開放鏈性質(引見此篇內的開放式回路)(會自己修正)
動作程式理面的東西是抽象的 不是模版 也並不唯一
而我們學一個新的程式 學的不是細節 學的的本質
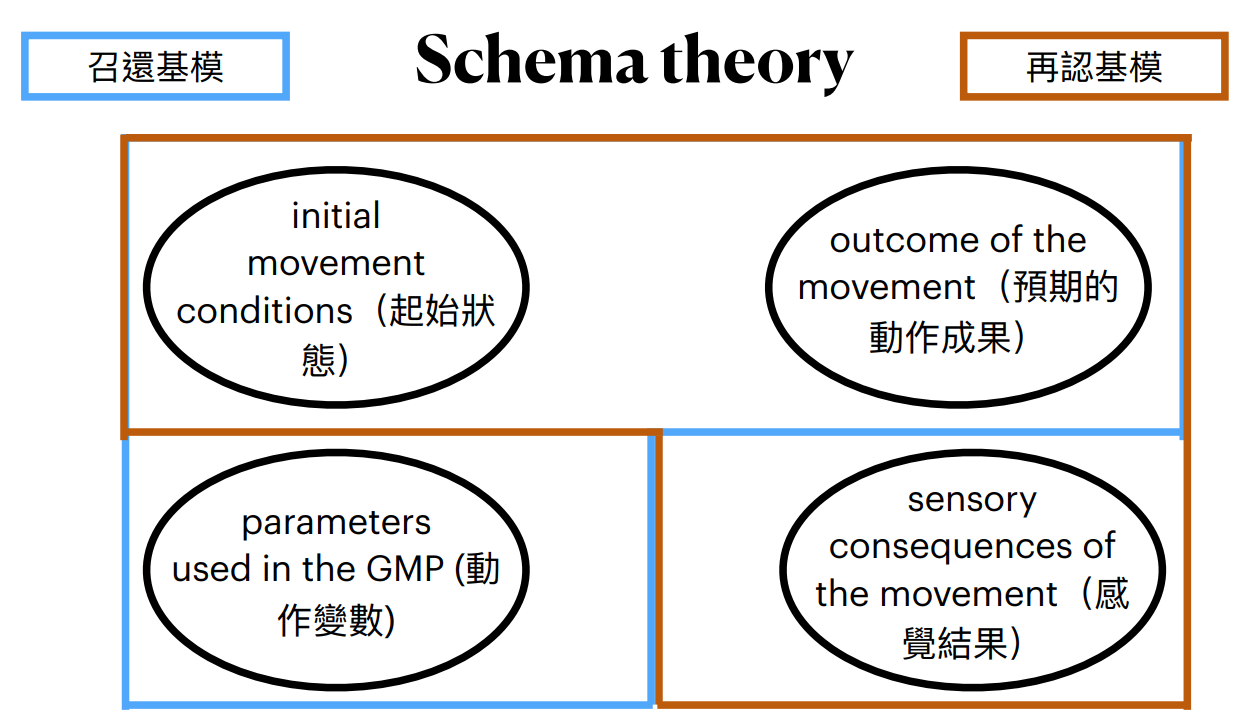
而基模包含以下四點內容
起始狀態
預期的動作結果
動作變數
感覺結果
這四點組合在一起變成抽象的概念或者記憶
而這四種內容又會組合成兩種基模
召還基模 即知道做一個動作需要甚麼參數
構成召還基模的有 起始狀態 預期的動作結果 動作變數
再認基模 意思是還沒做出來之前就猜到了會有啥結果
構成召還基模的則有 起始狀態 預期的動作結果 感覺結果
接下來講生態學習論
提到 學習這個過程包含三點 練習 環境限制 為了完成任務而尋找最佳策略
而在尋找最佳的過程中包含 感知線索(perceptual cues) 及 動作反應(motor response)
當認知與動作結合的過程 是找出完成任務的最佳解
先來講感知線索他分成了三個要素
Prescriptive role(處方的角色) 那我理解成理解題目並構思答案
(understanding the goal of the task and the movements to be learned)
Feedback role(回饋的角色)
在動作過程中(KP)和動作結果(KR) 都有回饋以修正
組織的角色 他可以將認知跟動作組合在一起 而這個組合經過篩選 已是最佳解
他還認為 學習的這個過程 不是重複單一學習一種技巧
是在特定工作目標下 將感知跟動作結合在一起不斷修正優化
而不是基模理論的增強動作的規則
所以這個理論會更加注重在我們動作控制的前三堂講(一 二 三)
看下來 生態學習論一樣強調感覺刺激的回饋
但他應該是更偏向主動對刺激的應對 而不是像之前提到的因應刺激輸入做改變