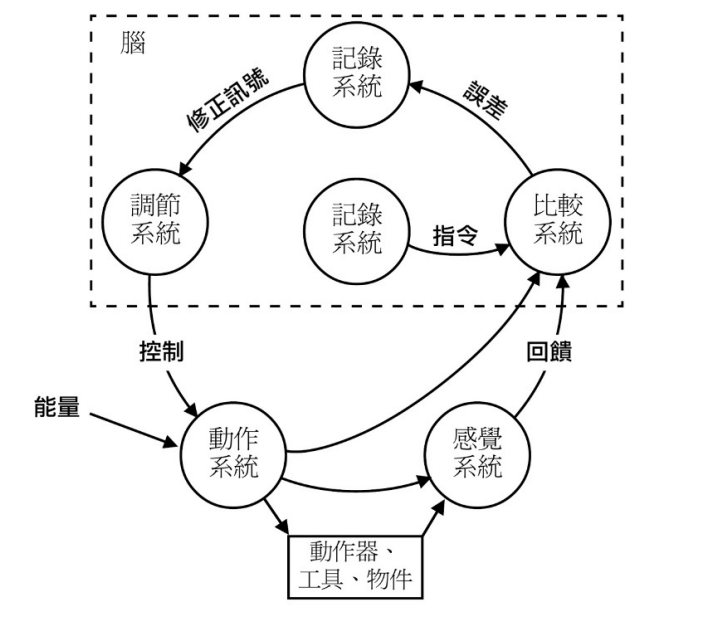
系統理論認為動作不只是單一系統控制/產生的
中樞系統 肌肉骨骼系統 感覺系統 外部因素
這四點一起作用下的結果浮現(意指共同作用交織下自然發生)
此理論主要觀點有
第一點 將身體作用在機械系統 那麼神經系統就不可以想出違反物理原則的動作
第二點 動作產生不是反應的結果 而是我們主動活動而產生的現象 所以動物才要靠持續感知而修改行為
第三點 就像是做一些很多個關節一起動的動作 假如腦子要每個獨立思考運算會很佔算力
所以他提出來協調結構(coordinative structure)
意思是大腦會讓肌肉組成一個小組 對小組下達指令 讓他們共同作用
第四點 生物體能活用多餘的自由度
意思就是 將多個單關節的組合在一起 高效且流暢的完成動作
第五點 大腦會把要做的動作做好參數 然後發到脊髓處 讓脊髓來完成動作
那大腦只需要負責計算 脊髓則實行起來 減少大腦的負荷 稱最小互動原則
也有一個特性是分佈控制 意思就是做一件動作 同時發到給不同的小組 讓他們彼此做自己的份內事
系統模式有兩種假設
第一種 神經系統要做的不是對小組指導他們做甚麼
而是讓他們以完成工作為目的 他們自行分配身體的資源達成目的
第二種 神經系統會依照肌肉骨骼系統所擁有的資源 預測動作的方式
並且在過程中不斷適合(優化資源分配)已達成最有效工作方式
臨床應用上 主要有以下幾點
第一點 動作是為了達成目的而產生 所以盡量訓練功能性動作主為
避免單純的練神經反射或者動作的型態(動作怎麼動)
第二點 可以加入不同環境 姿勢起始 視覺環境來訓練預測和適應性
第三點 教導病人以不同小組為主進行訓練
假若有些慣用小組受損 那麼我們應該引導病人嘗試他們目前最有效的小組 並且加以訓練
第四點 他強調 腦傷的病人的動作障礙雖有別於常人
但仍然是大腦已結合自身僅有的東西組合而成的結果
例如中風病人步態雖一拐一拐 但為了極力保持能動跟相對不容易跌倒 這是好的結果
第五點 他強調動作的形成可以是動態的 並不單一
動作會因為目標和環境而改變
例如 今天打球
有人傳球給你(環境刺激)
目標A: 投籃
目標B: 運球
這兩個動作在刺激一樣上 得到兩個不同的結果 原因在目標上
而另一個例子 今天我在公車上
要站穩(目的)
刺激A: 公車煞車
刺激B: 有人推撞
而這兩個刺激在這個動作的產生上是相同的 都是抓住扶手或者踏步來穩住身體